RUFOR.ORG
»
Многорежимный гиперзвуковой беспилотный летательный аппарат «Молот»
| Новая тема Ответить |
|
|
Опции темы | Поиск в этой теме | Опции просмотра |
|
|
 06.02.2017, 00:46
#1
06.02.2017, 00:46
#1
|
#1 |


Чебуралиссимус
|
В настоящее время ОАО «НПО «Молния» по тематике НИР«Молот» разрабатывает многорежимный гиперзвуковой беспилотный летательный аппарат. Этот БПЛА рассматривается как прототип–демонстратор технологий гиперзвукового беспилотного самолета-разгонщика с комбинированной экранной турбо-прямоточной силовой установкой. Ключевой технологией прототипа является применение прямоточного воздушно- реактивного двигателя (ПВРД) с дозвуковой камерой сгорания и экранным воздухозаборным устройством. Расчетно-экспериментальные параметры прототипа-демонстратора: -крейсерские числа Маха М = 1.8… 4 -высоты полета от малых до Н = 20 000 м, -полетная масса до 530 кг. -наземный старт с пусковой установки, с помощью твердотопливного ускорителя. Предысторией данной НИР был проект многорежимного сверхзвукового беспилотного летательного аппарата (МСБЛА) разработки ОАО «НПО «Молния», в котором определялся аэродинамический облик перспективного беспилотного или пилотируемого самолета-разгонщика. Ключевой технологией МСБЛА является применение прямоточного воздушно-реактивного двигателя (ПВРД) с дозвуковой камерой сгорания и экранным воздухозаборным устройством. Проектные параметры МСБЛА: крейсерские числа Маха М = 1.8… 4, высоты полета от малых до Н ≈ 20 000 м, стартовый вес до 1000 кг. Исследованная на стенде СВС-2 ЦАГИ компоновка воздухозаборника показала малую эффективность примененного подфюзеляжного клинового экрана, выполненного «заодно» с фюзеляжем (рис. А) и прямоугольного экрана с размахом, равным ширине фюзеляжа (рис. Б).  Оба они обеспечили примерное постоянство коэффициентов восстановления полного давления ν и расхода f по углу атаки вместо их увеличения. Поскольку для МСБЛА, как прототипа самолета-разгонщика, не подходил лобовой экран типа использованного на ракете Х-90, было решено на основании экспериментальных исследований ЦАГИ начала 80-х годов разработать подфюзеляжный экран, сохранив в качестве воздухозаборника конфигурацию с двухступенчатым центральным телом, полученную по результатам испытаний. В ходе двух этапов экспериментальных исследований на специальном стенде СВС-2 ЦАГИ, декабрь 2008 – февраль 2009 г. и март 2010 г., с промежуточным этапом численных поисковых исследований было разработано экранное воздухозаборное устройство (ЭВЗУ) с двухступенчатым конусным телом, имеющим различные расчетные числа Маха по ступеням, что позволило получить приемлемые тяги в широком диапазоне чисел Маха.  Эффект экрана состоит в увеличении коэффициентов расхода и восстановления при повышении угла атаки на числах Маха М >2.5. Величина положительного градиента обоих характеристик увеличивается с повышением числа Маха.  ЭВЗУ впервые разработан и применен на гиперзвуковом экспериментальном летательном аппарате Х-90 разработки НПО «Радуга» (крылатая ракета, по классификации НАТО AS-19 Koala)  В результате была разработана аэродинамическая конфигурация прототипа по названной авторами «гибридной» схеме с интеграцией ЭВЗУ в несущую систему. 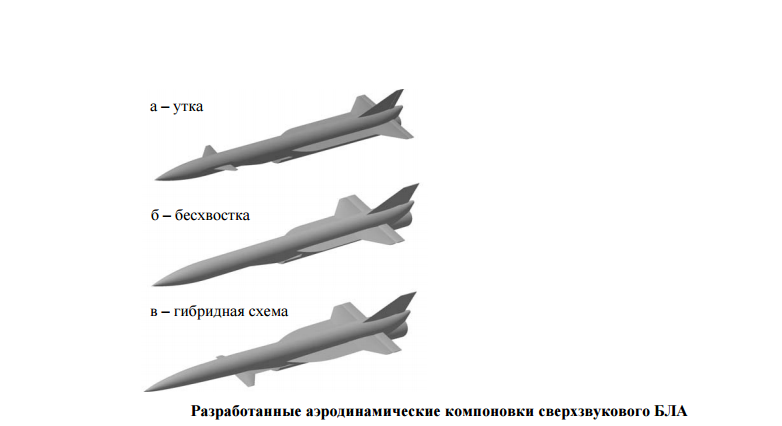 Гибридная схема имеет признаки как схемы «утка» (по количеству и расположению несущих поверхностей), так и схемы «бесхвостка» (по типу органов продольного управления). Типовая траектория МСБЛА включает запуск с пусковой наземной установки, разгон твердотопливным ускорителем до сверхзвуковой скорости запуска ПВРД, полет по заданной программе с горизонтальным участком и торможение до малой дозвуковой скорости с мягкой посадкой на парашюте. 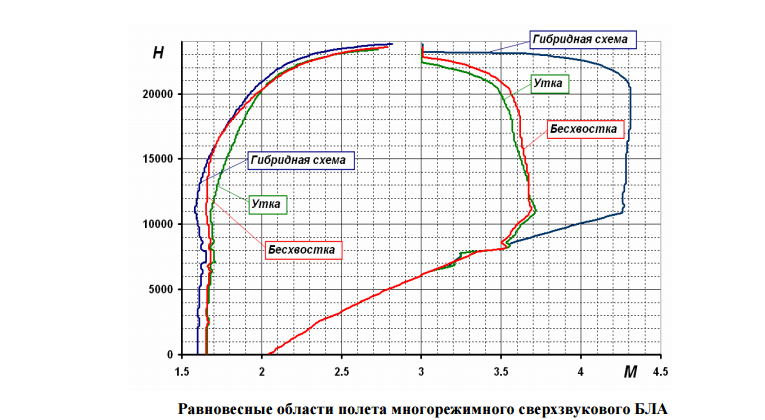 Видно, что гибридная компоновка за счет большего экранного эффекта и оптимизации аэродинамической компоновки под минимум лобового сопротивления при α = 1.2°… 1.4° реализует существенно более высокие максимальные числа Маха полета М ≈ 4.3 в широком диапазоне высот Н = 11… 21 км. Схемы «утка» и «бесхвостка» достигают максимального значения числа М = 3.72… 3.74 на высоте Н = 11 км. При этом гибридная схема имеет малый выигрыш за счет сдвига минимума сопротивления и при малых числах Маха, имея на высоте Н ≈ 11 км диапазон полетных чисел М = 1.6… 4.25. Наименьшая область равновесного полета реализуется у схемы «утка». В таблице приведены расчетные летно-технические данные по разработанным компоновкам по типовым траекториям полета. 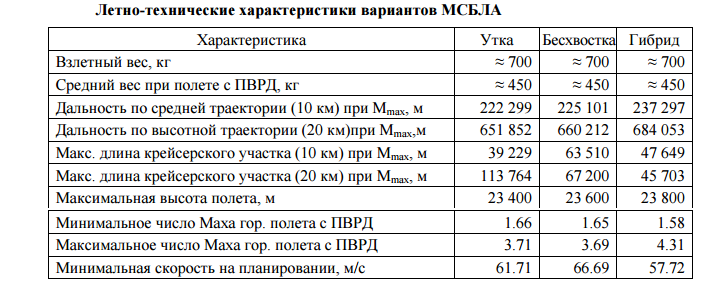 Дальности полета, имеющие одинаковый уровень у всех вариантов МСБЛА, показали возможность успешного создания самолета-разгонщика при несколько увеличенном относительном запасе керосинового топлива с дальностями сверхзвукового полета порядка 1500–2000 км для возврата на аэродром базирования. При этом разработанная гибридная компоновка, являющаяся следствием глубокой интеграции аэродинамической схемы и экранного воздухозаборного устройства прямоточного воздушно-реактивного двигателя, обладала явным преимуществом по предельным скоростям полета и диапазону высот, в котором реализуется предельные скорости. Абсолютные значения числа Маха и высоты полета, достигающие Мmax = 4.3 при Нmax Mmax = 20 500 м, позволяют говорить о реализуемости на уровне существующих в России технологий многоразовой авиационно-космической системы с гиперзвуковым высотным самолетом-разгонщиком, обеспечивающим снижение массы и, соответственно, стоимости космической одноразовой ступени в 6–8 раз по сравнению со стартом с земли. Данная аэродинамическая компоновка явилась окончательным вариантом для рассмотрения многоразового многорежимного беспилотного летательного аппарата больших сверхзвуковых скоростей полета. Концепция и общая компоновка Отличительным требованием к самолету-разгонщику, по сравнению с его малогабаритным прототипом, является взлет/посадка по самолетному с существующих аэродромов и необходимость совершения полета при числах Маха, меньших Маха запуска ПВРД М < 1.8… 2. Это определяет тип и состав комбинированной силовой установки самолета-разгонщика, имеющей в своем составе ПВРД и турбореактивные двигатели с форсажной камерой (ТРДФ). На основании этого был сформирован технический облик и общая компоновка самолета-разгонщика для транспортной космической системы легкого класса с проектной грузоподъемностью порядка 1000 кг на низкую околоземную орбиту 200 км. Была проведена оценка весовых параметров жидкостной двухступенчатой орбитальной ступени на основе кислородно-керосинового двигателя РД-0124 методом характеристической скорости с интегральными потерями, исходя из условий запуска с разгонщика.  На первой ступени устанавливается двигатель РД-0124 (пустотная тяга 30 000 кг, удельный импульс 359 с), но с уменьшенным диаметром рамы и сближенными камерами, или двигатель РД-0124М (отличается от базового одной камерой и новым соплом большего диаметра); на второй ступени двигатель с одной камерой от РД-0124 (принята пустотная тяга 7 500 кг). По полученной весовой сводке орбитальной ступени с общим весом 18 508 кг была разработана ее конфигурация, а на ее основании - компоновка гиперзвукового самолета-разгонщика на взлетный вес 74 000 кг с комбинированной силовой установкой (КСУ). 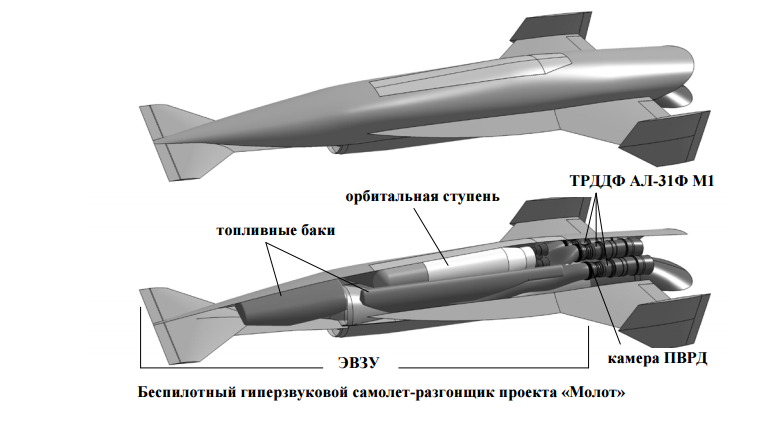 КСУ включает в себя: • ПВРД с аналогичным прототипу ЭВЗУ, типом и компоновкой камеры сгорания; 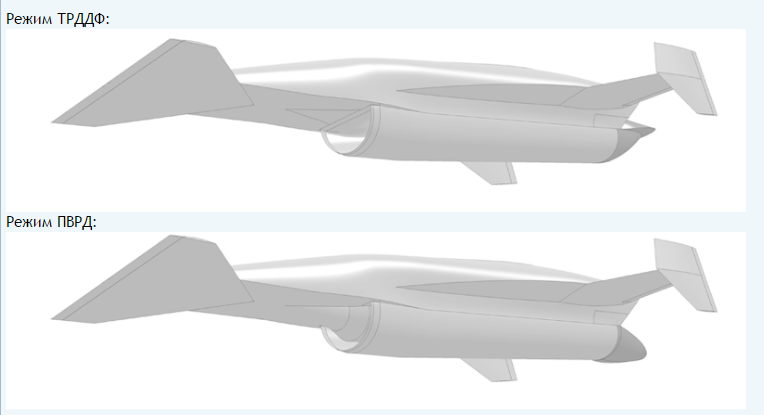 • Три турбореактивных двухконтурных форсажных двигателя АЛ-31Ф М1 ТРДФ и ПВРД расположены вертикальным пакетом, что позволяет монтировать и обслуживать каждый из них раздельно. Для размещения ПВРД с ЭВЗУ максимального размера и, соответственно, тяги, была использована вся длина аппарата. Максимальный взлётный вес аппарата 74 т. Масса пустого - 31 т. На разрезе видно орбитальную ступень - двухступенчатую жидкостную РН весом 18,5 т, выводящую ПН 1000 кг на низкую околоземную орбиту 200 км. Также видны 3 ТРДДФ АЛ-31ФМ1. Экспериментальную отработку ПВРД такого размера предполагается проводить непосредственно в летных испытаниях, используя для разгона ТРДФ. При разработке единой воздухозаборной системы были приняты базовые принципы: • Минимум подвижных частей при минимальных силовых нагрузках на них; • Полное сохранение теоретической геометрии ВЗУ ПВРД прототипа. Реализованные путем разделения воздуховодов для ТРДФ и ПВРД за сверхзвуковой частью воздухозаборника и разработки простого по исполнению устройства-трансформера, преобразующего «туда-обратно» сверхзвуковую часть ЭВЗУ в нерегулируемые конфигурации, одновременно переключая подачу воздуха между каналами. ЭВЗУ аппарата на взлёте работает на ТРДДФ, при наборе скорости М=2,0 происходит переключение на ПВРД. 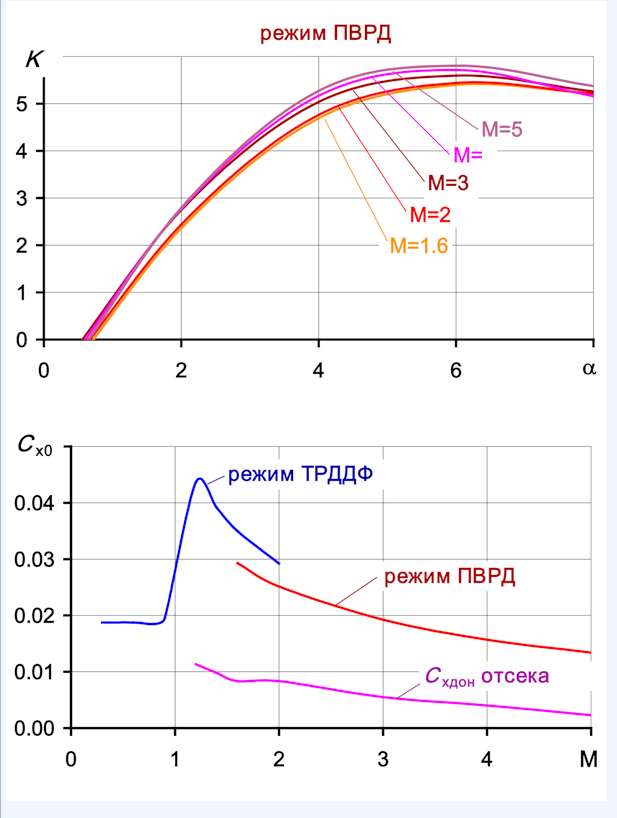 За устройством-трансформером ЭВЗУ расположены горизонтальным пакетом отсек полезной нагрузки и основные топливные баки. Применение вкладных баков необходимо для тепловой развязки «горячей» конструкции фюзеляжа и «холодных» теплоизолированных баков с керосином. За отсеком полезного груза размещается отсек ТРДФ, который имеет проточные каналы для охлаждения сопел двигателей, конструкции отсека и верхней створки сопла ПВРД при работе ТРДФ. Принцип работы трансформера ЭВЗУ самолета-разгонщика исключает с точностью до малой величины силовое противодействие на подвижную часть устройства со стороны набегающего потока. Это позволяет минимизировать относительную массу воздухозаборной системы за счет снижения массы самого устройства и его привода по сравнению с традиционными регулируемыми прямоугольными воздухозаборниками. ПВРД имеет расщепляющееся сопло-стекатель, которое в сомкнутом виде при работе ТРДФ обеспечивает безотрывный сток обтекающего фюзеляж потока. При раскрытии сопла-стекателя на переходе в режим работы ПВРД верхняя створка закрывает донный срез отсека ТРДД. Сопло ПВРД в раскрытом виде представляет собой сверхзвуковой конфузор и при некоторой степени недорасширения струи ПВРД, реализующейся на больших числах Маха, обеспечивает прирост тяги за счет продольной проекции сил давления на верхней створке. По сравнению с прототипом существенно увеличена относительная площадь консолей крыла из-за необходимости самолетных взлета/посадки. Механизация крыла включает только элевоны. Кили оборудованы рулями направления, которые могут использоваться как тормозные щитки на посадке. Для обеспечения безотрывности обтекания при дозвуковых скоростях полета экран имеет отклоняемый носок. Шасси самолета-разгонщика четырехстоечное с размещением по бортам для исключения попадания грязи и посторонних предметов в воздухозаборник. Такая схема отработана на изделии ЭПОС – аналоге орбитального самолета система «Спираль», что позволяет, аналогично велосипедному шасси, осуществлять «приседание» на взлете. 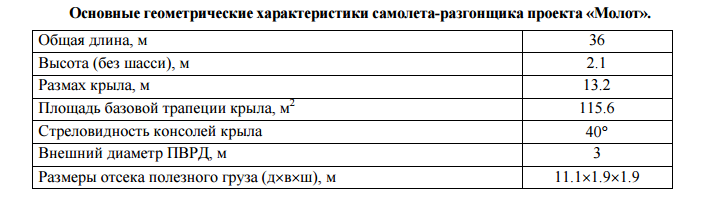 Для определения полетных весов, положения центра масс и собственных моментов инерции самолета-разгонщика была разработана упрощенная твердотельная модель в CAD-среде. 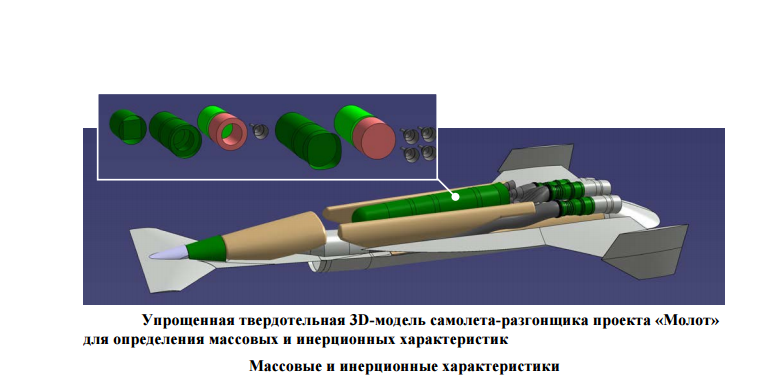 Конструкция, силовая установка и снаряжение самолета-разгонщика были разделены на 28 элементов, каждый из которых оценивался по статистическому параметру (удельный вес приведенной обшивки и т.п.) и моделировался геометрически подобным твердотельным элементом. Для конструкции фюзеляжа и несущих поверхностей использовалась весовая статистика по самолетам типа МиГ-25/МиГ-31. Масса двигателя АЛ-31Ф М1 взята «по факту». Различный процент заливки керосина моделировался усеченными твердотельными «слепками» внутренних полостей топливных баков. 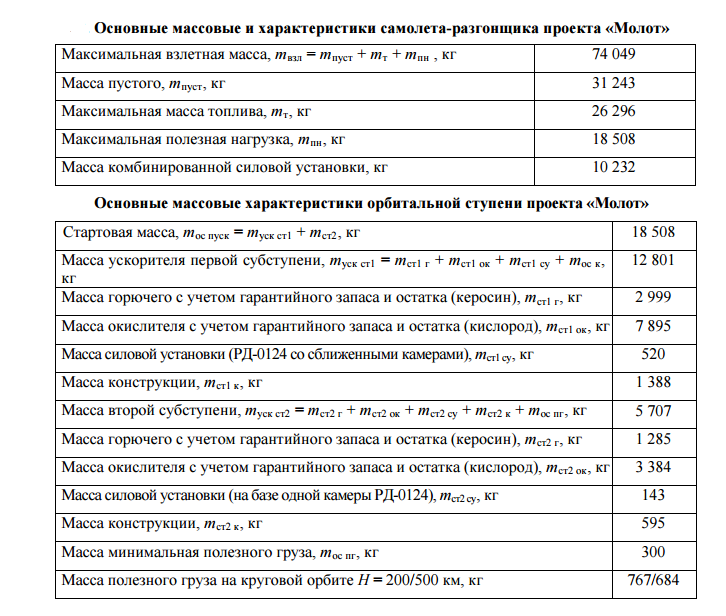 Также была разработана упрощенная твердотельная модель орбитальной ступени Массы элементов конструкции принимались на основе данных по блоку «И» (третья ступень ракеты-носителя «Союз-2» и перспективной ракеты-носителя «Ангара») с выделением постоянной и переменной составляющих в зависимости от массы топлива. Некоторые особенности полученных результатов аэродинамики разработанного летательного аппарата: 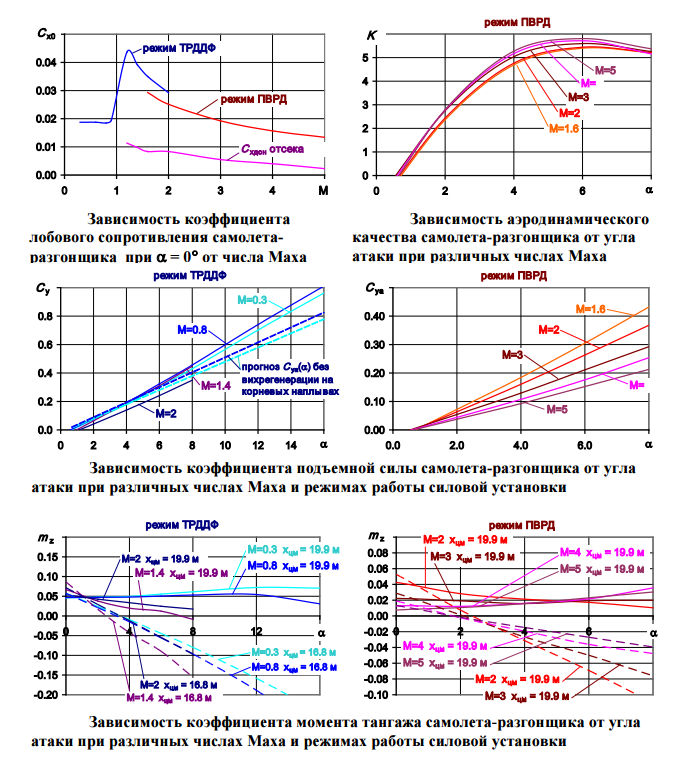 На самолете-разгонщике для увеличения дальности полета используется режим планирования при конфигурировании под ПВРД, но без подачи топлива в него. На этом режиме используется сопло-стекатель, которое уменьшает свой раствор при выключении ПВРД до площади протока, обеспечивающего течение в канале ЭВЗУ, такое, что тяга дозвукового диффузора канала становится равна сопротивлению сопла: Pдиф ЭВЗУ = Хсс ПВРД. Проще говоря, используется принцип работы дросселирующего устройства на установках для испытаний ВЗУ типа СВС-2 ЦАГИ. Подсобранное сопло-стекатель открывает донный срез отсека ТРДФ, который начинает создавать собственное донное сопротивление, но меньшее, чем сопротивление выключенного ПВРД со сверхзвуковым течением в канале ВЗУ. В испытаниях ЭВЗУ на установке СВС-2 ЦАГИ была показана устойчивая работа воздухозаборника с числа Маха М = 1.3, поэтому можно утверждать о выполнении режима планирования с применением сопла-стекателя как дросселя ЭВЗУ в диапазоне 1.3 ≤ М ≤ Мmax. Летные характеристики и типовая траектория полета Задачей самолета-разгонщика является запуск орбитальной ступени с борта в полете, при высоте, скорости полета и угле траектории, отвечающих условию максимума массы полезного груза на опорной орбите. На предварительном этапе исследований по проекту «Молот» ставится задача выхода данного летательного аппарата на максимальную высоту и скорость полета при использовании маневра «горка» для создания больших положительных значений угла траектории на ее восходящей ветви. При этом ставится условие минимизации скоростного напора при отделении ступени для соответствующего уменьшения массы обтекателя и снижения нагрузок на отсек полезного груза в раскрытом положении. Исходными данными по работе двигателей служили летные тягово-экономические характеристики АЛ-31Ф, скорректированные по стендовым данным двигателя АЛ-31Ф М1, а также пересчитанные пропорционально камере сгорания и углу установки экрана характеристики ПВРД прототипа. На рис. показаны области горизонтального установившегося полета гиперзвукового самолета-разгонщика в различных режимах работы комбинированной силовой установки. 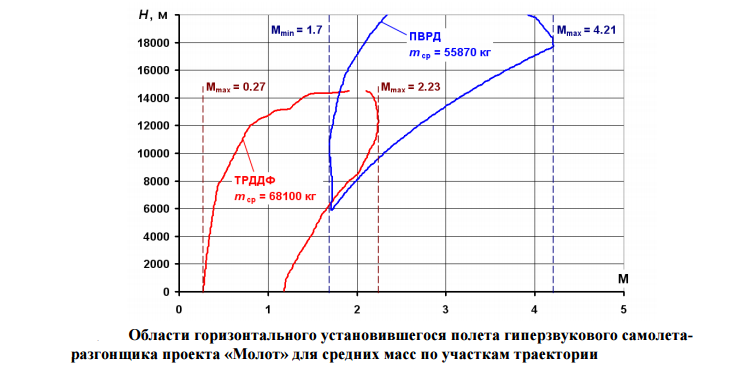 Каждая зона рассчитана для средней по соответствующему участку разгонщика проекта «Молот» для средних масс по участкам траектории полетной массы аппарата. Видно, что самолет-разгонщик достигает максимального числа Маха полета М = 4.21, при полете на турбореактивных двигателях число Маха ограничено значением М = 2.23. Важно отметить, что график иллюстрирует необходимость обеспечения для самолета-разгонщика потребных тяг ПВРД в широком диапазоне чисел Маха, что было достигнуто и определено экспериментально в ходе работ над экранным воздухозаборным устройством прототипа. Взлет осуществляется при скорости отрыва V = 360 м/с - несущие свойства крыла и экрана достаточны без применения взлетно-посадочной механизации и зависания элевонов. После оптимального набора высоты на горизонтальном участке Н = 10 700 м происходит выход самолета-разгонщика на сверхзвук с дозвукового числа Маха М = 0.9, переключение комбинированной силовой установки при М = 2 и предварительный разгон до Vopt при М = 2.46. В процессе набора высоты на ПВРД самолет-разгонщик выполняет разворот на аэродром базирования и достигает высоты Н0пик = 20 000 м при числе Маха М = 3.73. На данной высоте начинается динамический маневр по достижению максимальной высоты полета и угла траектории для запуска орбитальной ступени. Выполняется пологое пикирование с разгоном до М = 3.9 и последующим маневром «горка». ПВРД оканчивает работу на высоте Н ≈ 25000 м и последующий набор высоты происходит за счет кинетической энергии разгонщика. Запуск орбитальной ступени происходит на восходящей ветви траектории на высоте Нпуск = 44 049 м при числе Маха М = 2.05 и угле траектории θ = 45°. Самолет-разгонщик достигает на «горке» высоты Нmax = 55 871 м. На нисходящей ветви траектории, по достижению числа Маха М = 1.3, происходит переключение ПВРД → ТРДФ для исключения помпажа воздухозаборника ПВРД. В конфигурировании ТРДФ самолет-разгонщик планирует до выхода на глиссаду, имея запас топлива на борту Gгзт = 1000 кг. 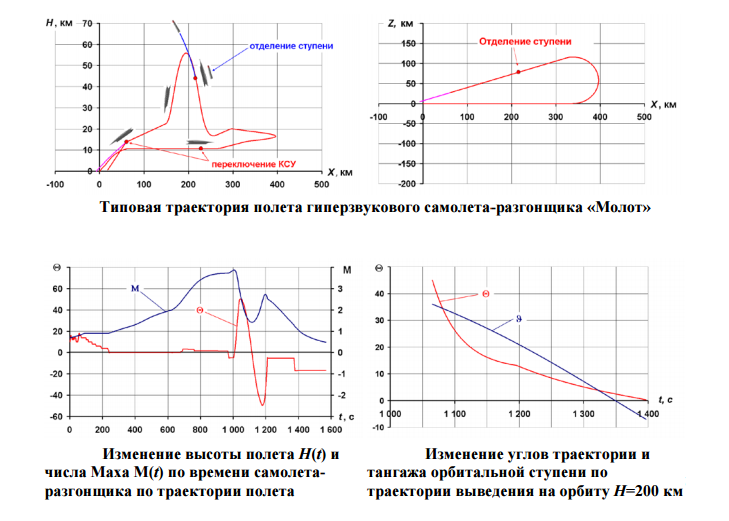 В штатном режиме весь полет от момента выключения ПВРД до посадки происходит без использования двигателей с запасом по дальности планирования. Изменение угловых параметров движения ступени показано на данном рисунке. При выведении на круговую орбиту Н = 200 км на высоте Н = 114 878 м при скорости V = 3 291 м/с отделяется ускоритель первой субступени. Масса второй субступени с грузом на орбите Н = 200 км составляет 1504 кг, из них полезный груз составляет mпг = 767 кг. Схема применения и траектория полета гиперзвукового самолета-разгонщика проекта «Молот» имеет аналогию с американским «университетским» проектом RASCAL, создающимся при поддержке правительственного ведомства DARPA. Особенностью проектов «Молот» и RASCAL является применение динамического маневра типа «горка» с пассивным выходом на большие высоты пуска орбитальной ступени Нпуск ≈ 50 000 м при малых скоростных напорах, для «Молота» qпуск = 24 кг/м2. Высотность пуска позволяет уменьшить гравитационные потери и время полета дорогостоящей одноразовой орбитальной ступени, то есть ее полную массу. Малые скоростные напоры пуска дают возможность свести к минимуму массу обтекателя полезного груза или вообще от него отказаться в отдельных случаях, что существенно для систем сверхлегкого класса (mпгН200<1000 кг). Принципиальным преимуществом самолета-разгонщика проекта «Молот» по сравнению с RASCAL является отсутствие бортовых запасов жидкого кислорода, что упрощает и удешевляет его эксплуатацию и исключает неосвоенную технологию авиационных многоразовых криогенных баков. Тяговооруженность в режиме работы ПВРД позволяет разгонщику «Молот» достигать на восходящей ветви «горки» «рабочих» для орбитальной ступени углов траектории θпуск ≈ 45°, в то время как разгонщик RASCAL обеспечивает своей орбитальной ступени стартовый угол траектории только θпуск ≈ 20° с последующими потерями из-за маневра доворота ступени. По удельной грузоподъемности авиационно-космическая система с гиперзвуковым беспилотным разгонщиком «Молот» превосходит систему RASCAL: (mпгН500/mвзл)молот = 0.93%, (mпнН486/mвзл)rascal = 0.25%. Таким образом, разработанная и освоенная отечественной авиационно-космической промышленностью технология прямоточного воздушно-реактивного двигателя с дозвуковой камерой сгорания («ключ» проекта «Молот») превосходит по эффективности применения на гиперзвуковых самолетах-разгонщиках перспективную американскую технологию MIPCC впрыска кислорода в тракт воздухозаборника ТРДФ. Гиперзвуковой беспилотный самолет-разгонщик массой 74 000 кг выполняет взлет с аэродрома, разгон, набор высоты по оптимизированной траектории с промежуточным разворотом на точку взлета до высоты Н =20 000 м и М = 3.73, динамический маневр типа «горка» с промежуточным разгоном в пологом пикировании до М = 3.9. На восходящей ветви траектории при Н = 44 047 м, М = 2 происходит отделение двухступенчатой орбитальной ступени массой 18 508 кг, спроектированной на базе двигателя РД-0124. После прохождения «горки» Нmax = 55 871 м в планирующем режиме разгонщик осуществляет полет до аэродрома, с гарантированным запасом топлива 1000 кг и посадочной массой 36 579 кг. Орбитальная ступень выводит на круговую орбиту Н = 200 км полезный груз массой mпг = 767 кг, на Н = 500 км mпг = 686 кг. Справка. 1.Лабораторно-испытательная база НПО "Молния" включает следующие лабораторные комплексы: Лаборатория статических прочностных испытаний 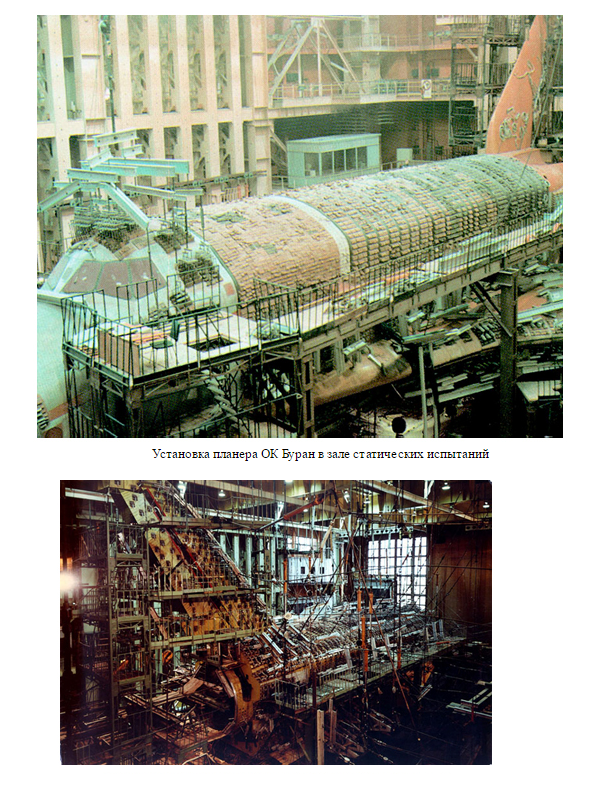 Лаборатория динамических испытаний Лаборатория криотермовакуумных испытаний 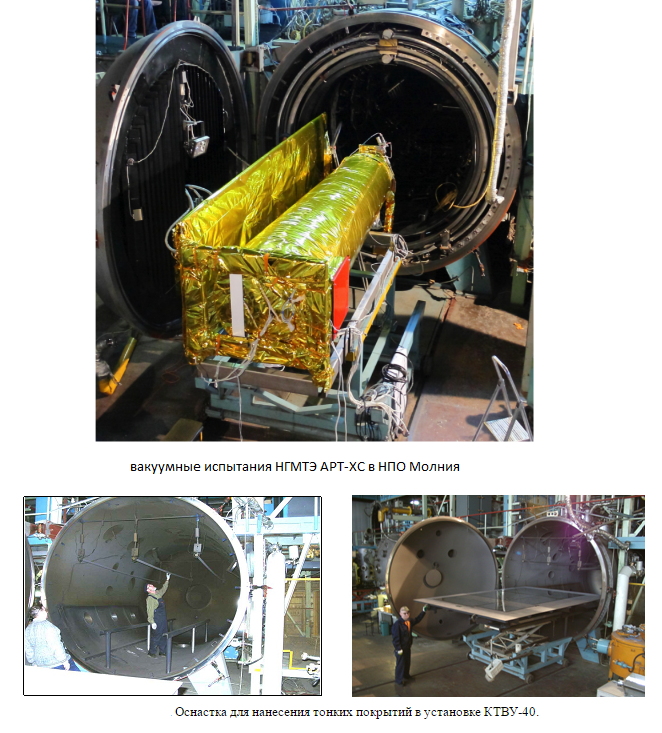 Лаборатория климатических испытаний Лаборатория трибологических испытаний 2.А это проект высокоскоростного гражданского самолета HEXAFLY-INT Который является одним из крупнейших международных кооперационных проектов. В нём задействованы ведущие европейские (ESA, ONERA, DLR, CIRA и др.), российские (ЦАГИ, ЦИАМ, ЛИИ, МФТИ) и австралийские (The University of Sydney и др.) организации. 3. Прим: 3-D модель в начале статьи никакого отношения не имеет к НИР "Молот". Статья на основе работы: Проект «Молот» гиперзвукового беспилотного самолета-разгонщика с комбинированной экранной турбо-прямоточной силовой установкой /Макеич Г. С., Тюкаев М. Ю. (Московский авиационный институт (национальный исследовательский университет), Волоколамское шоссе, 4, Москва, A-80, ГСП-3, 125993, Россия), Чибисов Я. Н. (ОАО Научно-производственное объединение «Молния»)/ Использованы материалы, фотографии и видео Автор: Антон [opus] |
  |
| Новая тема Ответить |
| Метки |
| гла |

 Комбинированный вид
Комбинированный вид
|
|
 Похожие темы
Похожие темы
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| Малый беспилотный летательный аппарат «Тахион» | ezup | Беспилотники | 0 | 28.11.2017 15:05 |
| Беспилотный летательный аппарат «Тянь И» / SW6 (Китай) | ezup | Беспилотники | 0 | 10.11.2016 23:45 |
| Беспилотный летательный аппарат Supercam 350 | ezup | Беспилотники | 0 | 07.08.2016 23:03 |
| Беспилотный летательный аппарат Wing Loong (Китай) | ezup | Беспилотники | 0 | 20.11.2014 23:31 |
| Гиперзвуковой летательный аппарат X-51A | ezup | США | 0 | 16.08.2012 09:25 |